Obiecałem podzielić się z Wami dokładną instrukcją budowy własnego czujnika smogu. Chciałbym skierować tą instrukcję do osób, które nie zajmują się zawodowo elektroniką i IT, ale jakieś śladowe pojęcie o powyższych posiadają. Są trzy etapy budowy czujnika: pozyskanie podzespołów, zbudowanie czujnika, zaprogramowanie. Takie też będą trzy części tego artykułu.
Cały projekt może być zmodyfikowany na wiele sposobów. Tutaj będę chciał Wam pokazać rozwiązanie moim zdaniem optymalne pod względem kosztów, jakości i wytrzymałości konstrukcji.
Potrzebne elementy czujnika
- Sensor pyłu zawieszonego: na rynku dostępnych jest wiele czujników laserowych mierzących stężenie pyłu zawieszonego w powietrzu. Testowałem kilka z nich i zdecydowałem się na wykorzystanie sensora SEN0177 formy DFROBOT. Sensor można zamówić w Polsce (Botland, TME) lub bezpośrednio u producenta (DFROBOT).
- Moduł komunikacyjny: serce naszego urządzenia. Tutaj mamy dwa wyjścia:
- komputer z rodziny Raspberry Pi (najlepiej Raspberry Pi Zero – ze względu na rozmiar). Moduł można kupić w wielu miejscach, np. tutaj. Raspberry PI działa pod kontrolą linuxa, więc jest bardzo uniwersalne. Łączy się ze światem przez WiFi, ale dzięki obecności złącza USB można podłączyć np. modem 3G. Raspberry będzie proste do uruchomiania i programowania, ale potrzeba nabyć sporo umiejętności, by zrobić z niego urządzanie, które będzie mogło bezawaryjnie działać długi czas (niedługo napiszę o tym więcej).
- moduł komunikacyjny oparty o układ ESP32. Na rynku różnych modułów komunikacyjnych jest kilkadziesiąt rodzajów, ale ja wybrałem jedną rodzinę, którą i Wam polecam. Chodzi mi o produkty firmy PyCom, w szczególności och najprostszy moduł: WiPy 2.0 IoT ESP32. Jest to małe urządzenie wyposażone w łączność WiFi, które programujemy w Pythonie. Moduł można kupić w botlandzie. Ja do swoich czujników wybieram właśnie ten moduł – i Wam też polecam.
- Obudowa: budując czujnik smogu stajemy przed sporym problemem – musimy zbudować urządzenie odporne na wilgoć, ale przewiewne. Na pierwszy rzut oka trudno pogodzić te dwie właściwości. Najlepszym rozwiązaniem wydaje się obudowa radiacyjna – jest to rodzaj obudowy meteorologicznej, do osłaniania czujników przed czynnikami takim jak światło słoneczne i woda bez zaburzania swobodnego przepływu powietrza. Po długich poszukiwaniach udało mi się znaleźć bardzo dobrą i tanią obudowę pod hasłem osłona czujnika stacji meteorologicznej.
- Dodatkowe sensory: w wersji podstawowej czujnika dodatkowe sensory nie są potrzebne, ale jak jest możliwość to warto rozszerzyć pomiar o temperaturę, ciśnienie i wilgotność. Tutaj wybrałbym coś zintegrowanego i koniecznie cyfrowego z dobrą komunikacją: np. coś takiego.
- Zasilanie: urządzenie będzie potrzebowało zasilania 5V, więc potrzebujemy zasilacz: ja wybieram taki zasilacz z TME. Do zasilacza warto kupić przedłużacz, który pozwoli na pozostawieniu zasilacza w budynku i przepuszczenie cienkiego kabla np. poprzez przytrzaśniecie w oknie.
- Drobne elementy: potrzebujmy jeszcze złącze zasilania (ja używam takiego – ważne, żeby pasowało do zasilacza), paczkę przewodów z końcówkami (można bez nich, ale ułatwiają życie) i listwę goldpin, żeńską, precyzyjną. Przydadzą się również koszulki termokurczliwe.
Potrzebne narzędzia itp.
- Coś do cięcia przewodów i zdejmowania izolacji
- Lutownica + cyna
- Pistolet i klej na gorąco
- Do prawidłowego zaprogramowania modułu WiPy potrzebna jest podstawka za 99 zł.
Podsumowanie kosztów
- Czujnik pyłu: 269.00 zł
- Moduł komunikacyjny: 135.00 zł
- Obudowa: 48.60 zł
- Dodatkowe sensory: 113.90 zł
- Zasilacz: 29.91 zł
- Przedłużacz: 20.17 zł
- Złącze zasilania: 6.17 zł
Razem wychodzi 622.74 zł brutto (z dodatkowych czujników można zrezygnować – wtedy wyjdzie ok. 500 zł).
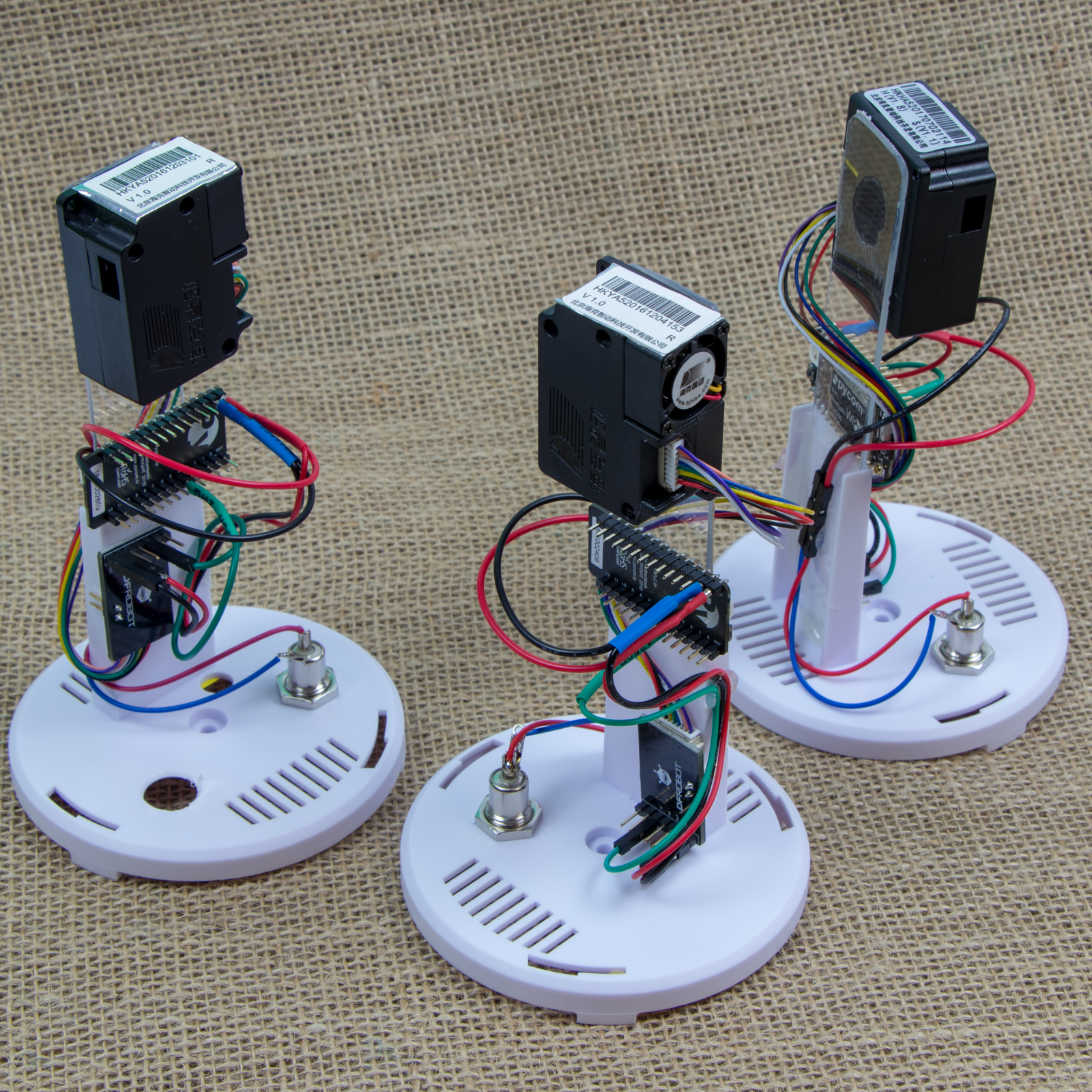
W momencie pisania tego wpisu mam oczekujące zamówienia na 3 czujniki, więc zamawiam podzespoły i przy montażu zrobię dla Was instrukcję – zapraszam za ok. tydzień.